| THERMO Spoken Here! ~ J. Pohl © | TOC NEXT ~ 58 |
Lift-Off Acceleration

Motion characteristics of a rocket during its lift-off are observed by a tracking laser housed in a blast-proof bunker at a distance from the launch pad. The figure shows the initial situation.
The tracking electronics "lock" multiple laser beams to sensors mounted on the nose of the rocket. The geometry of an arbitrary position of the rocket (for one tracking device) is shown in the schematic.
Upon lift-off, as the laser tracks the sensor, its electronics record the distance to the sensor, d(t), its angle of altitude, θ(t), the rate of angle change, d(θ(t))/dt (angular velocity), and the rate of change of the angular velocity, d²(θ(t))/dt² (angular acceleration). Submitted to its computer, this information tells the "nose" altitude, z(t), its speed, dz(t)/dt and its acceleration, d²z(t)/dt² being set positive as counter-clockwise and the . We use the I, J vector basis. Position of the BODY in terms of this basis is written as:
(P(t)), velocity
(V(t)) and
(A(t)) acceleration.
| P(t)BODY = r [cosθ(t)I + sinθ(t)J] |
(1)Position of a BODY as a function of time. |
In what follows we will not carry the notation "BODY." The derivative of position with respect to time yields the velocity of the BODY (V(t)). Next the derivative of that velocity (which is the second derivative of the position) produces a mathematical expression, the acceleration of the BODY (A(t)). Each is written in a "magnitude times unit vector" form where the unit vectors, I and J are fixed in direction. The vectors are:
 |
(2)Postion. |
 |
(3) Velocity or dP(t)/dt. |
 |
(4) Acceleration is d(dP(t)/dt)dt or dV(t)/dt. |
Problems can be solved with the above set of vectors written just as they are. However a simpler, less writing-intensive vector representation is available. We will use the "truth" of the above set (which you can see) to develop new representations.
First recognize that the above three vectors are written in magnitude-unit vector forms. However, these results can be used to confirm a simpler, of representing P(t), V(t) and A(t).
Compare the directions (unit vector parts) of the vectors, V and A with that of the initial unit vector, the direction of P. Immediately we see the direction of A is opposite the direction of P. Using a simple sketch, we see the direction of velocity, V is perpendicular to the direction of P, and directed toward increasing angle, θ. Thus we define er(t), and eθ(t).

The graphic representation of the unit vectors with analytic statements of position, velocity and acceleration vectors are shown.
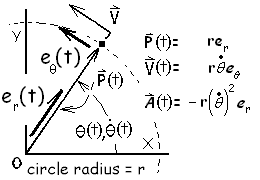
| P(t) = r er(t) | (5) Position: r is constant. |
| V(t) = r(dθ/dt)eθ(t) | (6) dθ/dt is the constant rotation rate. |
| A(t) = - r (dθ/dt)2 er(t) | (7) Here the rotation rate (dθ/dt) is squared. |
Extension of this idea to apply to non-circular motion, that is for a radius that varies in time, r = r(t), follows easily since the radius is a scalar. The new vector basis described here is:
| er(t), eθ(t) and K, (when needed) | (8)
The vectors apply for motion in a plane. |
The vectors discussed here apply for motion of a body "in a plane" about some point (with constant radius). These represent a number of physical cases. To extent the motion for varying radius (but still in a plane) would be the next step of study.
Lift-Off Acceleration
Motion characteristics of a rocket during its lift-off are observed by a tracking laser housed in a blast-proof bunker at a distance from the launch pad. The figure shows the initial situation.